オンラインにて8月24日~26日にわたって開催された「CEDEC2021」。ここでは、8月26日に行われたセッション「“不可能を可能に”『動くガンダム』実現までのプロダクションノート」の内容をお届けする。
登壇者は、ガンダム GLOBAL CHALLENGEより石井啓範氏、アスラテックより吉崎航氏。お台場に建てられた立像としてのガンダムに続き、更に高みを目指すべく横浜に作られた「動くガンダム」を実現に導いた立役者たちが、巨体を動かすための創意工夫、制作プロセスや、制御ソフトに関することなどを紹介する。
動くガンダムとは?
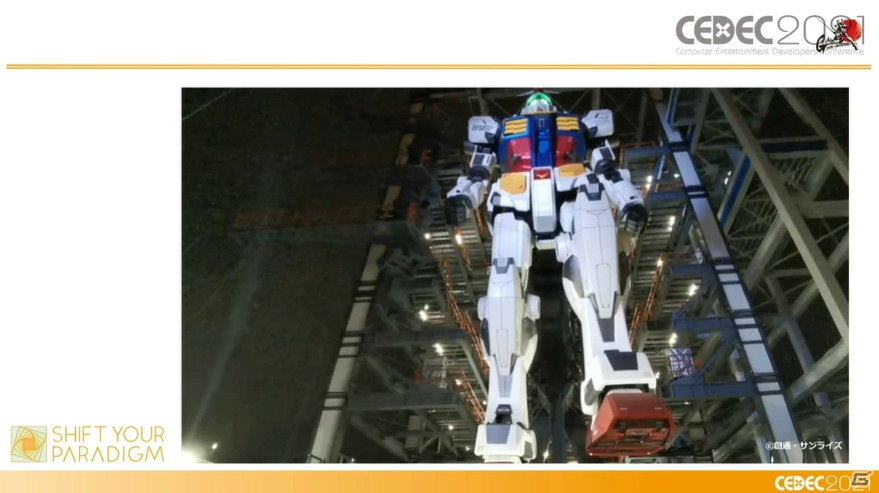
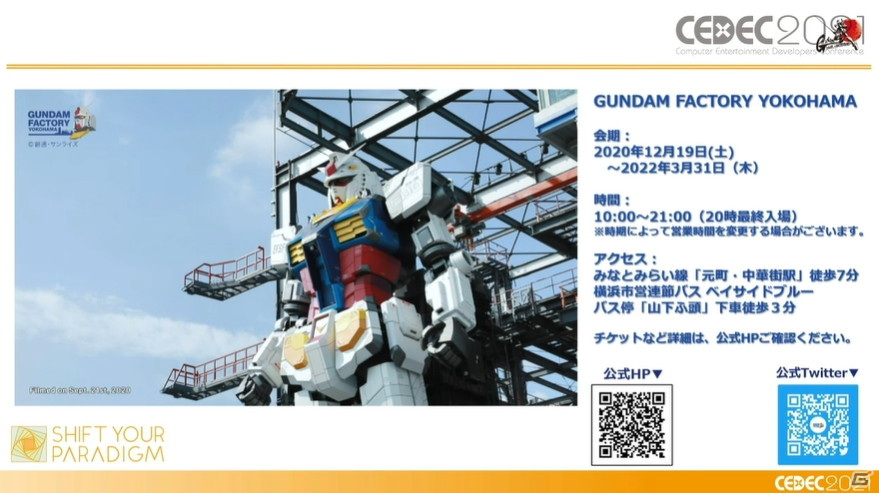
GUNDAM FACTORY YOKOHAMAにて、2020年12月19日から2022年3月31日まで展示される、18mもの巨大な実物大のガンダム。その特徴は“動くこと”にある。しかもこの実物大のガンダムには、劇中にあるガンダムの動きを再現しようというコンセプトもあった。
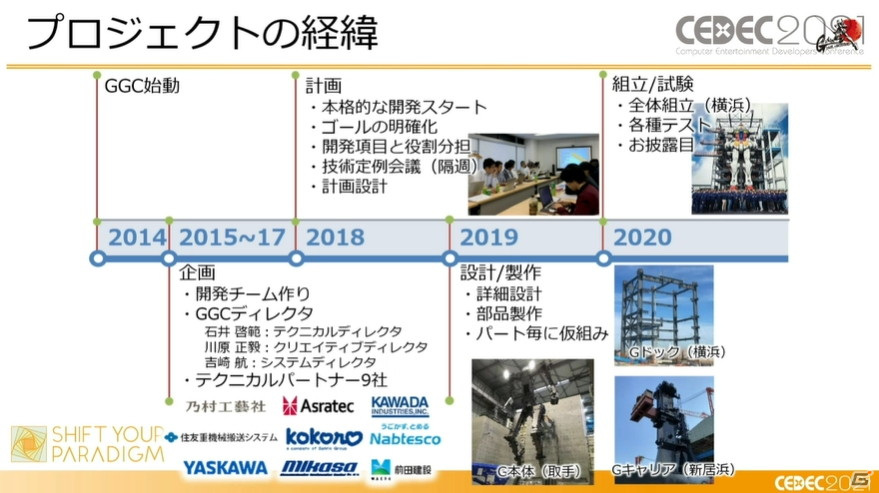
ガンダムを動かそうというこの取り組みは、10年前のガンダム30周年時、お台場にガンダムの立像が展示され、50日間の展示期間で約450万人の来場を記録したところまで遡る。2014年にプロジェクトは始動したが、最初の3年間は開発チームを作るのに費やしていたという。
本格的に開発が始まったのは2018年からで、テクニカルパートナーらと2週間に1回、30名ほど集まっての定例会議が開かれるようになった。2019年に設計/製作に入り、Gドッグは横浜で、Gキャリアは新居浜で、G本体は取手で製作されていた。2020年にいよいよ全体の組立や各種テストに入り、12月に晴れて一般公開が始まった。
……と書くと、意外と短い期間で作られていそうだと感じる人もいるかもしれないが、実際の道程はそんな簡単ではない。
本当に18mもの巨大ロボットを動かすことが出来るのかという、実現性。転倒などの危険性がないかの、安全性。それでいて、ガンダムらしさを損なうデザインには出来ないという、美術性。これらを兼ね備えたガンダムを作らなければならないのだ。
その全てを実現するために、この動くガンダムには様々な技術が集結している。Gドックはビルや建造物の技術が使われており、巨大なガンダムの格納庫の役目を担ってる。Gキャリアでは重機や建設機械の技術が使われており、25tの重さを前後上下に動かすことが可能。ガンダム本体には重機技術が使われつつ、関節には産業ロボットの技術を使い精密な動きを可能にし、更にエンタテイメントロボットの技術で繊細な表現が出来るようになっている。
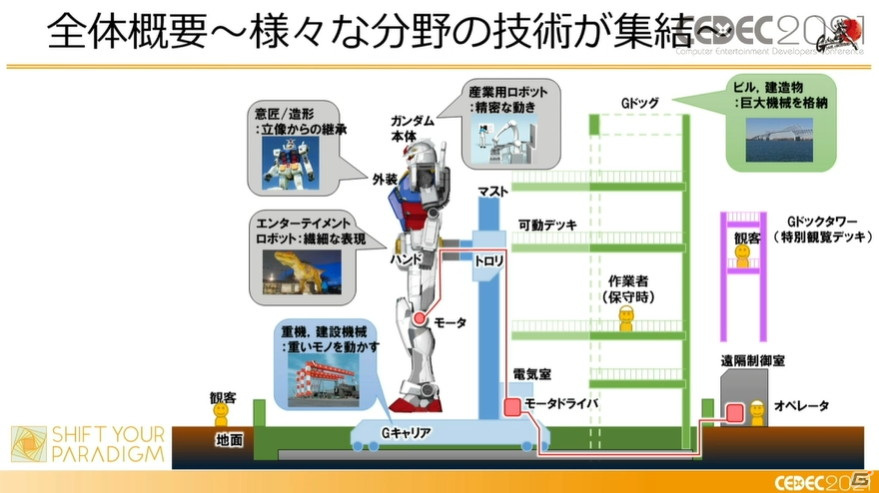 |
| 緑色で塗られているのがGドック、青がGキャリアとなる。 |
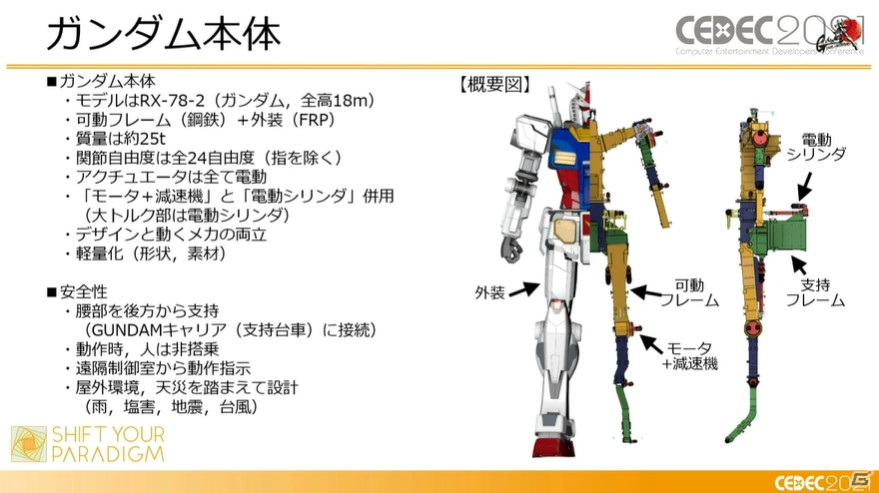
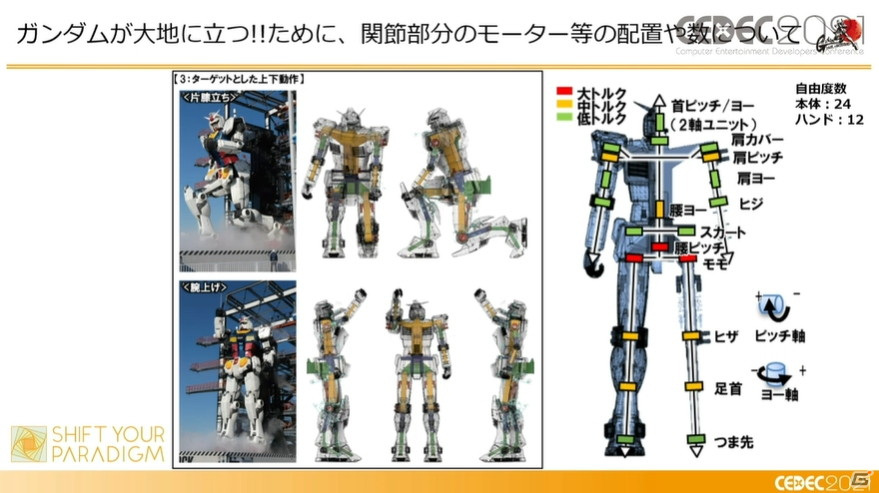
ガンダム本体のベースは、RX-78-2。いわゆる初代ガンダム(アムロ機)だ。可動フレームはほぼ鉄で出来ており FRPの外装で覆われている。指を除き、関節自由度は全24自由度。アクチュエータは全て電動で、モータと回転型減速機で動かしているが、腰回りはそれだけでは足りないため、電動シリンダを併用。動かすために、より軽量化を試みているが、重さは約25tある。
なおアクチュエータは油圧のほうがより力を出せるものの、油圧はポンプやサブタンクをどこに搭載するかという問題が起こるため、今回は電動を選択しているという。安全性ももちろん最大限配慮されており、腰の後ろからGキャリアで支えている。屋外環境であることも踏まえて、雨、塩害、地震、台風などにも備えて作られているが、この中で一番怖いのは風とのこと。風は最大風速55mにまで耐えられるように設計しているが、台風などの接近予報が来た場合は予めワイヤーで固定したりして備えるようになっている。なお、地震では転倒の危険性は問題ないように作られているが、地震でパーツの破損などが起こった際のチェック体制もしっかり行っているとのことだ。
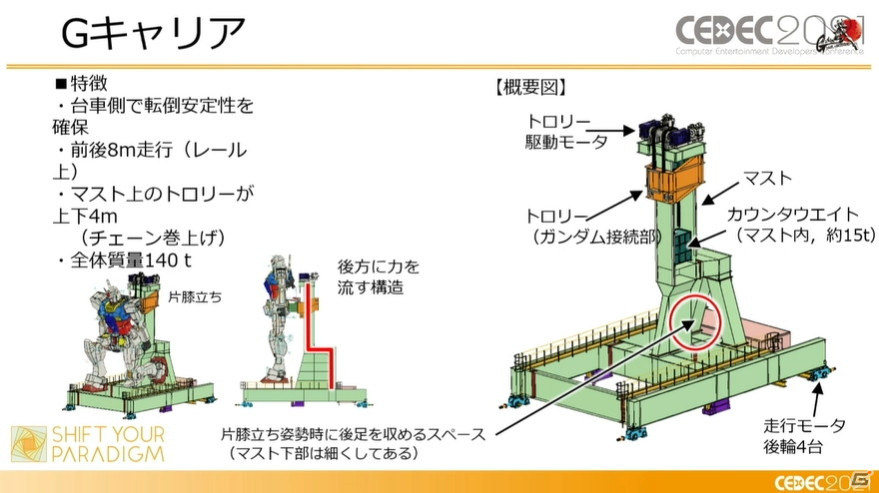
Gキャリアは前後に8m走行、マスト上のトロリーが上下4m動くようになっており、マストの中にバランスを保つ役割の重りが入っている。ガンダムが膝立ちの姿勢をする時に後ろ足を格納するスペースが必要なため、そのスペースを確保してあるのがGキャリアの特徴だ。
Gドックは6階建ての多段式保守デッキで、前方のメンテナンスを行うための可動デッキがある。18mのガンダムを格納できる巨大な開放空間で、Gドックの隣に観覧用のタワーがある。観覧用のタワーからは、ガンダムをより近くで見ることができる。

このガンダムはエンタテイメントロボット、産業ロボット、重機など様々な要素が含まれているため、階層構造に分けることで、ひとつの演出制御装置に見えるようにしているという。安全系は独立で監視しており、間違った指示が送られた場合ガンダムは停止するようになっている。動作プログラムは「V-Sido(ブシドー)」という吉崎氏が開発したシステムを使っており、先にCGで確認しながら関節をどこにするかなど決めてきたそうだ。
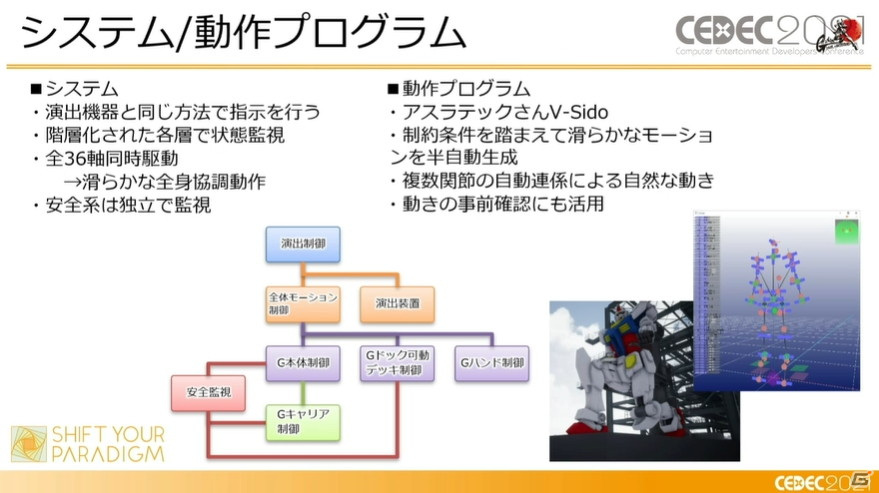
また、この動くガンダムではモーション作成にOpenGL、VRで動作確認をする際や事前安全確認、ビデオコンテ、展示ソフトにUnity、実際の観客の視点からどのように見えるかの視野確認にUnrealを使用しているなど、ゲーム的な要素も使って実際にガンダムを動かしているという。
 |
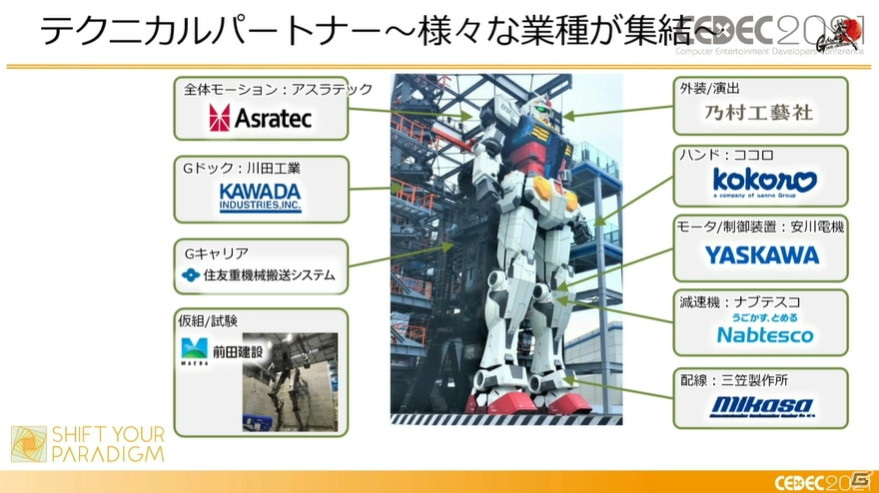 |
| 動くガンダム実現のために、多数の業種/企業が集結している。 |
動きやデザインの選択
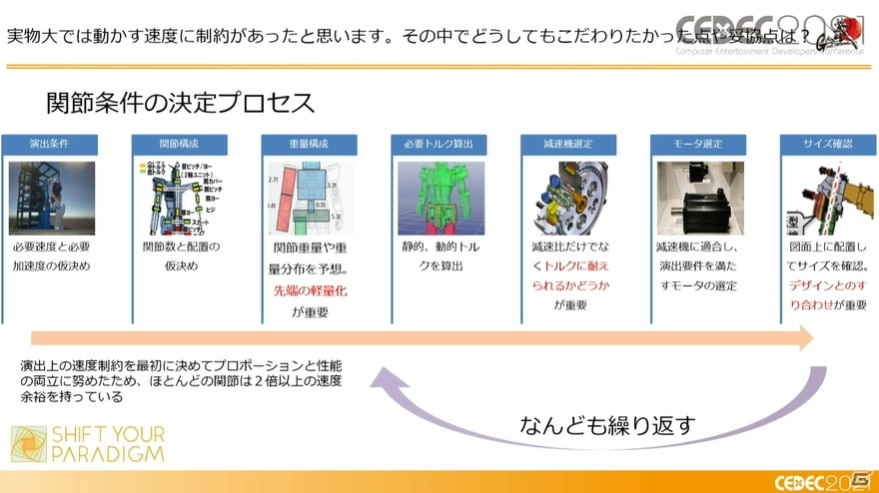
動くガンダムを実際に作るにあたって最も重要なのは、どういう動きをさせたいかだ。今回は、片膝立ち、歩行、腕を上げるという主に3つの動作をさせるにあたり、それを可能にするように関節の配置を決めていったという。
上下前後の動きをする回転軸が多く、全体の関節の大半がピッチ軸(y軸)で、ヨー軸(z軸)が3つ程度。減速機が鉄の塊であるため、減速機のサイズは重量に大きく関係するのだが、肘に力を出したいからといって肘に大きな減速機をつけると今度は重さで肩が動かなくなったりするため、動きを損なわずに動きを実現させるという、非常に緻密な調整が行われている。
とにかく苦労したのは“スカート”と呼ばれている腰回りの部分で、上半身の前後移動や腿の移動でもスカートに当たってしまうという問題があり、最初はメカ的にリンクさせて動かすことを考えていたが、よりリアルな動きにするために肩カバーとスカートはモーターをつけて動かすことになったという。なお、ガンダムのゲームなどではスカートは干渉したまま動かしているものが多いそうだ。
ガンダムの一番のポイントはデザインだが、実際に動かすことを想定したデザインではないので、動かすこととデザインとの両立が最も大変だったという。デザイン面ではいくつか工夫をした場面があるが、動くガンダムならではの特徴としては足の軸の位置を変更した。
腿の動きは前と後ろでカバーをふたつに分け、ひとつは体、ひとつはシリンダーに固定して、スライドして動きを隠すようにする工夫をしており、肩の付け根はハの字にし、腕を上げた時にダイナミックに見せつつ、腰が左右に動いた時に腕と腰のクリアランスを確保する役割を果たしている。
また、動きを突き詰めていくと、どんどん人間らしい造形になっていくという。膝の位置は元々のデザインだと足が長く見えるようにもっと上にあるのだが、実際に動かすためには膝をもっと下にずらして人間の身体に近づけないとならなく、膝を下げた分、膝のカバーを上方に延ばして、見た目ではほぼ解らないように近づけたそうだ。
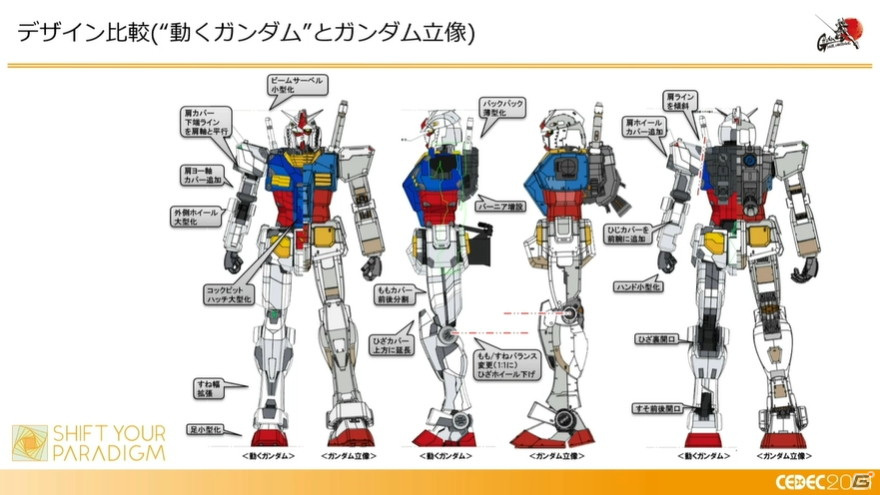 |
| 画面中央から右はお台場ガンダムで、左は横浜ガンダム。 |
重さや風、Gキャリアで支えることなども考慮して、ビームサーベルも小さく、バッグパックも小さくなり、足のサイズもコンパクトになっている。ちなみに、このビームサーベルは残念ながら動くガンダムでは「持てるように設計されていない」とのこと。そもそもハンドだけで200Kgあるため、“200Kgの自分の手を持つ”という動作のために肩や肘などの設計を考えており、違う動きや何かを持たせようとするならば、この動くガンダムとは全く別の設計が必要になる。
VRも使用してのシミュレーション
この巨大ガンダムを動かすにあたって、“ガンダムが動く速度”というのも重要なファクターであるが、実は今回のガンダムでは技術的に最速で動かせるガンダムは目指していないという。
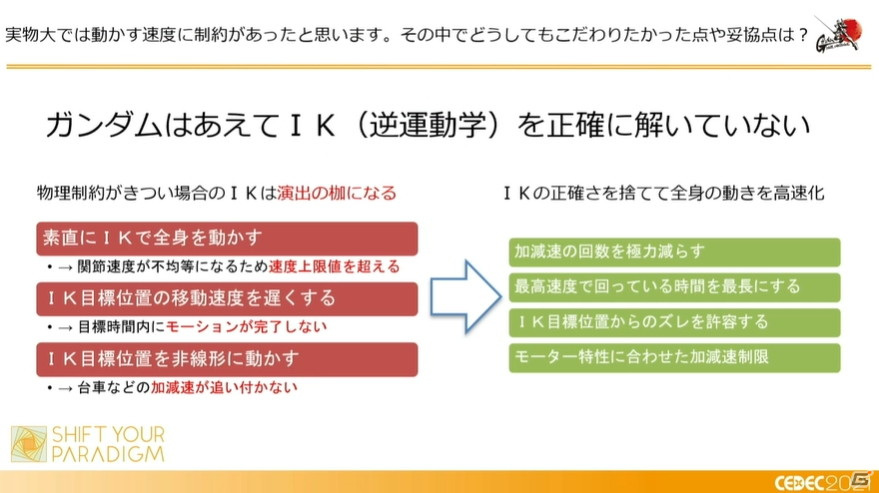
演出上の速度制約を最初に決めたあと、プロポーションと性能の両立に努めているので、ほとんどの関節は2倍以上の速度余裕を持っている。また、モーターよりも先に減速機を選んでいるのがこのガンダムの大きな特徴で、最後のモーター選びは大きなサイズひとつよりも小さなサイズのモーターをふたつ組み合わせたほうが良いのではないかなど、様々な試行錯誤を繰り返して、最終的な上限が決まったそうだ。
また、足先が地面から滑らないように全身に運動制御を行っている。左足を着いて地面に足を降ろしたように見えても、実はGキャリアで支えてているので、左足は地面に着いていないという。動きを遅くすると30秒の動きに1時間かかってしまうことが実際にあるそうで、速度上限を超えないまま加速度の回数を極力減らす工夫が必要なため、左足が少しずれていても観客たちから見て不自然でなければ、それは充分許容範囲である、とのことだ。
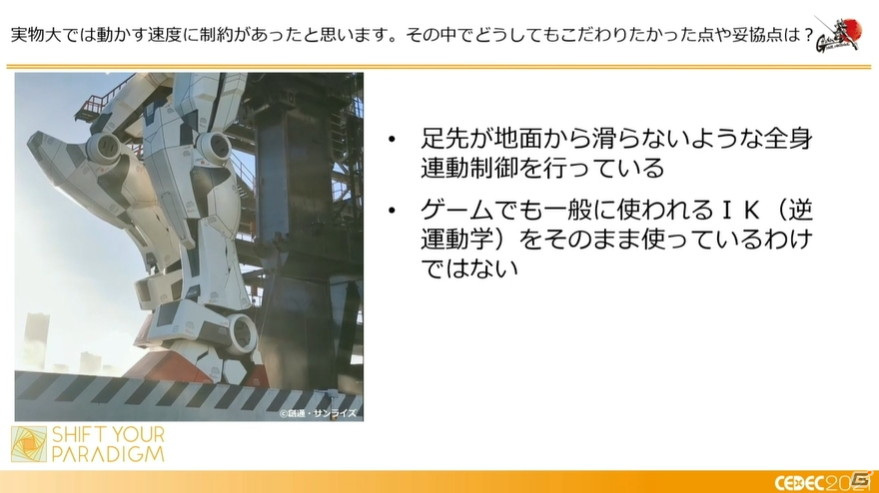
とは言っても、ゲームでもよく使われているIK(逆運動学)をそのまま適用することは出来ず、FK(回転)のフィルタとあわせてどちらも使用しているという。
ガンダムの動きは、吉崎氏が開発したロボット制御システム「V-Sido」を使用しており、V-Sidoでモーションエディットやフィルタリング、最適化、モーターの特性に合わせての自動調整などまで行え、ガンダムの掌の動きはこのソフトでリアルタイムで制御している。
 |
| 足から下が赤く表示されているのは、負荷を可視化している。 |
また、関係者によりイメージをきちんと伝えて事前に確認してもらいたかったため、「V-Sido Visualizer」というアプリをUnityで開発し、可動できなかった動きなどもこのソフト上で確認して、どうすれば解決できるかという問題共有にも役立ったそうだ。また関係者にVRで完成予想図を見てもらうことも出来、ガンダムの原作・総監督でもある富野由悠季氏からも様々な感想をもらったという裏話もあった。
富野氏からは「Vサインはできないのか」という要望があったが、モーションを用意しておらず、公開からもさらに試行錯誤を重ねて今月21日(8月21日)、ついに初めてVサインが出来るようになった。そもそもこのガンダムには指を開く関節がついていないため、見た目がVサインに見えるような調整をしているという。
 |
| このVサインは試験的なもので、一般公開の予定はないとのこと。 |
また、富野氏はGキャリアを使用しないで動かせないのかという点も聞かれたが、6階建てビルの大きさに相当する18mのガンダムが地球上で二足歩行するというのは現実的ではなく、月面であれば可能かも、というレベルのもののようだ。
動くガンダムを実現するにあたって様々なソフトを使用したというが、V-sido以外に使用したソフトは、Unity(3Dソフトウェア開発)、Shade(3Dモデリング+CAD取り込み+形式変換)、Z Blush(3Dモデル編集)、Photoshop(2D)など、ゲーム業界にも馴染み深いものが多い。
「稀に使う」として挙げていたソフトも、Blender(3D形式変換)、Twin motion(レンダリング)、Fusion360(CAD)など、グラフィックを扱っている人ならば知っているソフトが並んでいる。
Shadeはゲーム業界でも多く使われているが、そもそもは建築パース制作などに使用されることが多かったソフトで、CADモデルの取り込みに長けているために使用していたという。また、BlenderはCG周りでは欠かせないソフトになっており、Shadeとの相性も良かったので愛用していたそう。また、ガンダムの単体パーツをいじりたい時にはZ Blushが役に立ったという。
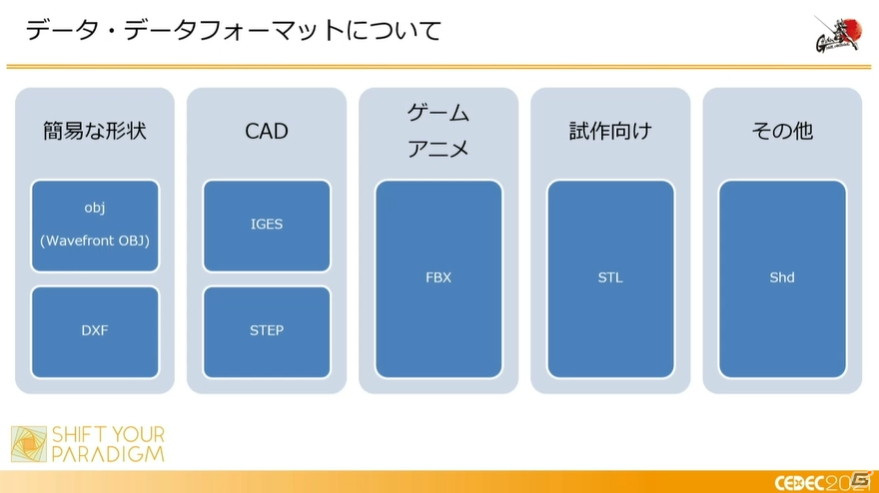 |
| 使用していたデータフォーマットも紹介。 |
なお、実際にガンダムを動かすのに使っているV-sidoは、C++、VC++、C#、Java Scriptなどの開発言語で作成されており、開発環境はほぼVisual Studioで、一部にUnityを使用しているとのこと。
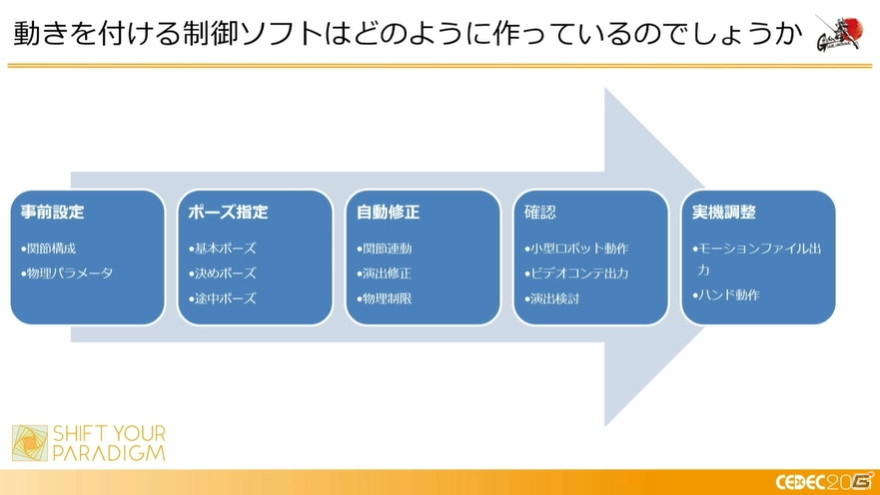 |
| V-sidoで行っていることの流れ。 |
試作機や、実機とのシミュレーション
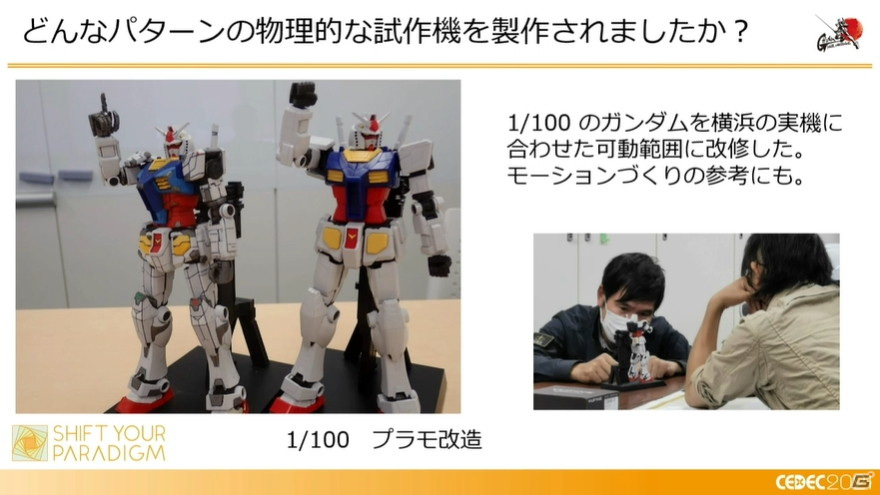
ほぼソフトウェア上で完成したかのように見えるガンダムだが、デザインの確認は立体を作ったほうが良いため、3Dプリンタやペーパークラフト、ガンプラ改造などで、様々な形の試作機を作ったという。最初は1/500サイズから始まり、最終的には1/48サイズのかなり大きな試作機も作成。このサイズの試作機にはモータも組み込んでいて、下半身はV-sidoで動かせるようにしていたそうだ。
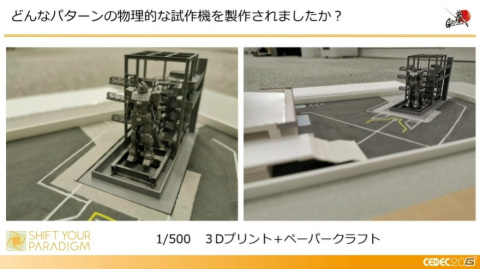 |
 |
|
|
そうして、いよいよ実際に組み立てられたガンダムが、ソフトウェア上と同じ動きをするかどうかを確認する。ほんの少しでもずれることによって大きな振動が発生し、部品が破損する可能性などが出てきてしまうのだ。特にスカートは腰を捻るなどほぼ全ての動作に干渉するので、CG設計上で上手く動いていても、最後まで気が抜けない部分だった。実際にはCG上で上手くいかなかったところを確認し合いながら作成しており、減速機なども精密なものを使用しているため、ほぼ差がない形で実現したという。
 |
 |
このように様々な難所を乗り越えて、無事に完成したガンダムの、オフィシャルメイキングブックが発売されるという。このセッションで語られた以上の詳細が記されており、メカが好きな人ならば間違いなく楽しめる一冊となっているそうだ。受注期間は2021年9月26日までなので、もっと詳しい内容が知りたい人はぜひ手に入れてほしい。
なお、「二足歩行のガンダムよりも、キャタピラのガンタンクのほうが作れるのでは」というような話も上がるようだが、ガンタンクも全長15mほどのサイズがあるため、これを実機で作るとなると、鉱山で動かす重機レベルのものになるという。今回の動くガンダムも足裏だけで乗用車や戦車ほどのサイズになるため、ガンタンクを作ろうとするとキャタピラのコマひとつが自動車一台以上のサイズになるのではないか、とのことだ。
また、作れるものならばザクを作ってみたいが、膝についているパイプなどを考えると安定して動かすのは難しいのでは、とも語った。
最後に吉崎氏と石井氏は、予算が無限にあれば全てアルミフレームなどの手もあったかもしれないが、開発する上で予算は当然のファクターであり、技術の上限も含めてバランスを取る仕事であることや、1年以上もの長い期間、屋外という過酷な環境で毎日動かすということなどに触れ、そこも踏まえてこの動くガンダムを開発したことを述べ、今後ロボットとゲームはより親密な関係になっていくのでは、とも語った。横浜に訪れた際には実物を見に来てほしい、とセッションを締めくくった。
本コンテンツは、掲載するECサイトやメーカー等から収益を得ている場合があります。